


Zurück zu
Themen dazu:
Wissenstransfer Veranstaltungstechnik
Aufbau von Punktzügen nach BGV C1
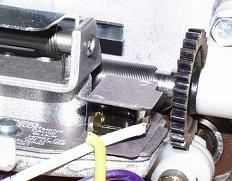
Hier eine Typische Anordnung eines umgebauten Industriekettenzug mit zwei theatertauglichen Bremsen. Im Vordergrund ist ein Zweispur Encoder und ein Vierspur Stromag Endschalter - Notendschalter zu sehen.
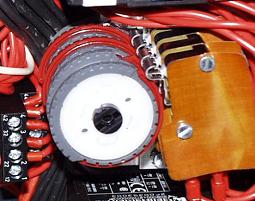
Oftmals ist der Grund einer Betriebsstörung der Ausfall des Gleichrichters für die Bremsen.
Nebenstehendes Bild zeigt die Diodengleichrichterplatine mit den blauen Varistoren. Varistoren haben die Aufgabe die Spannungsspitzen zu bedämpfen die durch das unterbrechen des Stromkreises auftreten, wenn die Bremsen einfallen sollen. Da die Bremse elektrisch eine Spule darstellt, wird beim öffnen des Stromkreises wie beim Unterbrecherkontakt im Auto auch eine hohe (zünd) Spannung induziert, welche die Gleichrichterdioden belastet.
Typische Bremse eine BGV D8 Motors (CM)

Planung
Eine sorgfältige Planung und die Übersicht zum Ganzen kann dabei erheblich Kosten und Aufwand einsparen helfen. Ist z. B. ein Videowürfel von 5,5 Tonnen zu heben, so ist der erste Gedanke meist "Flächenlast an mehr als drei Zügen" (6 Stück Eintonner). Es wird nach Durchführungsanweisung für szenische Fahrten eine Synchronfahrt mit Gruppenabschaltung benötigt. Würde man dagegen den Würfel an drei Punkten befestigen und an jedem dieser Hängepunkte eine Ausgleichswaage anbringen, die Wegeschwankungen von zwei Kettenzügen ausgleichen kann, so handelt es sich jetzt um den Lastfall "Flächenlast an drei Zügen kombiniert mit Streckenlast an zwei Zügen". Jetzt wird nur noch die Zusatzausstattung Asynchronfahrt mit Gruppenabschaltung, Reset über Synchronpunkt und Schlafseilerkennung benötigt, was bis zu 1/3 der Kosten senken kann. Auch in diesem Fall spielt die Dynamik eine große Rolle. Sind die Hängepunkte der Dachkonstruktion bereits nah am Limit, so wäre ein bei Antrieben ohne Frequenzumrichter der Einsatz von einem System mit selbsthemmenden Getriebe von Vorteil, da die dynamische Belastung von einfallenden Bremsen wesentlich höher ist, als das sanfte Auslaufen eines dynamisch selbsthemmenden Getriebes.
Muss man dennoch eine starre Flächenlast an mehr als drei Zügen heben, ist besonders die maximale Störfalltoleranz zu beachten. Denn was nutzt die erfolgreiche Notabschaltung, wenn nicht sichergestellt ist, dass die Antriebe nicht über einen tolerierbaren Weg herausfahren und somit doch die Hängepunkte überlastet werden.
So sind neben den offensichtlichen Parametern, wie Geschwindigkeiten, Lastaufnahme und Hubhöhe, die im Umfeld des Einsatzortes gegebenen Rahmenbedingungen, wie dynamische Belastbarkeit der Hängepunkte oder Biegebeanspruchung der Last und deren maximal zulässige Wege-Toleranz zwischen den Hängepunkten, noch unbekannt. Hier kann ein Fachplaner und oder Statiker für das Projekt die Daten nennen. Eine Riggingfachkraft oder ein Bühnenmeister kann über die BGV C1 Durchführungsanweisung "Bereitstellung und Benutzung von Punktzügen (SP 25.1/2-1)" für den entsprechenden Lastfall die benötigten Ausstattungsmerkmale des Kettenzuges benennen.
Bleibt noch die Vorzüge der ergonomischen Bedienung anzupreisen und das Durchspielen von "worst case" Havarie-Szenarien. Daraus wird ein Pflichtenheft erstellt auf Grund dessen ein System guten Gewisses angeboten werden kann.
Endschalter
DIN 56950 Maschinentechnische Einrichtung
7.7.4.2 Schutz bei Ausfall der Fahrbereichsbereichsbegrenzungen:
Notendschalter müssen zwangsläufig, fromschlüssig und nach dem Ruhestromprinzip arbeiten.
Elektronische Schalter und Meßeinrichtungen sind in Ihrem Sicherheitsniveau mechanischen Schaltern gleichzusetzen.
Amtliche Lösung: ein Tüv geprüfter Getriebeendschalter der Firma Stromag. Mit den weißen Stellschrauben verstellt man:
- Betriebsend Oben
- Betriebsend unten
- Notend oben
- Notend unten
Die Schwarze Stellschraube verdreht den gesamten Revolver. Der Getriebeendschalter ist auch mit sechs Stufen für Zwischendeckeneinfahrten erhältlich.

Hier eine Lösung, bei der die Gefahr besteht, das nach dem Transport das Blech verbogen sein kann. Der Schalter kann nicht mehr betätigt werden. Auch handelt es sich hier nicht um das Ruhestromprinzip.
Eine typisch amerikanische Lösung. Diese Schalter sind nur als Betrieb oben und Betrieb unten ausgeführt was für einen Kettenzug der nicht den Anspruch auf BGV C1 hat auch vollauf ausreicht.
Betrachtet man bei dieser 4 Spur Endschalterlösung die Schlitzschrauben, so muß man erkennen das diese nicht gesichert sind. Alleine durch das anlösen können die Schalter von der Noppe weggedrückt werden, ohne das ein Schaltimpuls ausgelöst wird.
Lasterfassung
DIN 56950 Maschinentechnische Einrichtung
7.7.4.3 Schutz bei Überschreiten der Nennbelastung -
1,2 facher Wert, In Gegenrichtung darf gefahren werden.
Kettenzüge nach BGV D8 arbeiten in der Regel mit einer Rutschkupplung, die eine Überlast und damit das sprengen der Kette wirksam verhindert. Bei Kettenzüge die als BGV C1 umgebaut werden, ist es von Prüfer zu Prüfer sowie vom Kettenzug zu Kettenzug unterschiedlich ob ein verstiften der Rutschkupplung verlangt wird. Damit die Last oder für die Zusatzausstattung Unterlasterkennung das Schlaffseil richtig erfaßt und gegebenenfalls einer Steuerung übermittelt werden können, gibt es folgende Möglichkeiten:
Über Dehnungsmeßstreifen mit kontinuierlicher Werteübermittlung kann über eine geeignete Anzeige und Auswertung bereits im Vorfeld geeignete Gegenmaßnahmen eingeleitet werden. Dieser Wert ist jederzeit abrufbar und ist insbesondere für Hallen mit viel Gastspielbetrieb ideal um Beschädigungen durch Überlastungen am Gebäude vorzubeugen.

Ein Feder Wage Meßsystem mit Schaltkontakt.
Dieses System muß vor Ort eingestellt werden und hat nur Schaltzustände. Ein Ablesen der aktuellen Last ist nicht möglich.
In dieser Ausführung wird das Gewicht der gesamte Kette mit berücksichtigt - Sprich wie der Hängepunkt belastet wird. Befindet sich das Feder-Wagesystem z.B. am Getriebe, wird nur die Last berücksichtigt. Kette die Kettensack liegt, findet keinen Einfluß.

Das messen des Betriebsstrom des Antriebes
Dabei hat die Praxis gezeigt, dass beim Meßverfahren über den Betriebsstrom große Schwankungen aufgrund der Betriebs- und der Außentemperatur vorliegen. Außerdem kann die Strommessung nur arbeiten wenn der Motor im Betrieb ist. Ein Aufsetzen von anderen verfahrenden Objekten im eigenen Stillstand wird nicht erkannt. Auch das nachträgliche Einhängen in das Rig und dem evtl. überschreiten der Überlast wird von diesem System nicht erkannt, da der Motor keinen Fahrbefehl erhält und damit der Motorstrom 0 ist - sprich keine Last oder
Der Ort der Lasterfassung ist zu unterscheiden ob das Gewicht der Kette die im Kettensack nicht aktiv am Heben beteiligt ist, Einfluß auf die Messung hat oder nicht.
Wegerfassung
Eine zuverlässige Wegerfassung wird nicht nur für den Betriebskomfor (Um den Kettenzug auf ein exaktes Ziel zu fahren, weiter sogar dieses abzuspeichern und beliebig oft zu reproduzieren) benötigt, sondern ist bei bestimmten Zusatzausstattungen sicherheitsrelevant.
DIN 56950 Maschinentechnische Einrichtung
7.7.4.7 Schutz bei Überschreiten der Gleichlauftolleranzgrenzen
DIN 56950 Maschinentechnische Einrichtung
7.7.4.8 Stillsetzen bei Überfahren von vorgegebenden Zielpunkten
Diese folgende Funktion wird erst bei Lastfällen mit Zusatzausstattung Z3 nach BGV C1 sowie Fahrmodi Synchrone Punktzuggruppenfahrt notwendig.
DIN 56950 Maschinentechnische Einrichtung
7.6.3.2 Synchrone Gruppenfahrt
Vor Beauftragung einer Anlage sollten die Parameter der vertretbaren Gleichlauftolleranz sowie insbesondere die maximale Störfalltolleranz definiert sein. Die maximale Störfalltolleranz gibt an, wie weit die einzelnen Züge selbst in einem Störfall auseinander driften können. Bei einem weiträumigen Traversensystem mögen z.B. 10 cm durchaus keinerlei kritischen Auswirkung hervorrufen, aber bei einer starren Stahlkonstruktion ruft in einem Störfall die gleiche Abweichung Kräfte hervor, die weit außerhalb des tolerierbaren liegen können. Deshalb ist eine schnelle exakte Wegmessung genauso wichtig wie eine Steuerung die diese Werte schnell genug überprüfen kann. Erst dann ist eine kleine Störfalltolleranz möglich. Dabei spielt natürlich die Geschwindigkeit der Fahrt eine erhebliche Rolle und ist der Grund weshalb in der Bühnentechnik mit den Winden die mit 1,2 m/sek verfahren erheblich mehr Aufwand getrieben werden muß um eine akzeptable und sichere Berechnung durchzuführen, als bei langsamen Kettenzügen, die mit ca. 8m / Min verfahren.
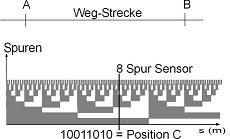
Absolutwertgeber, zu jedem Zeitpunkt ist die absolute Position verfügbar. Durch mögliche Plausibilitätsüberprüfungen ist dies die sicherste Wegerfassung. Zur Zeit ist der Absolutwertgeber zwingend erforderlich um eine SIL 3 Klassifizierung zu erreichen.
Jederzeit ist die absolute Position anhand des Bitmuster eindeutig zuzuordnen
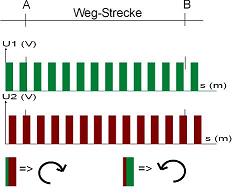
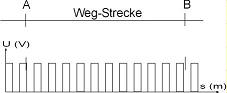
Impulszählung mittels A B Spur Encoder. Die zwei um 90° versetzten spuren erlauben der Elektronik eine Drehrichtung zu erkennen, je nachdem ob die 2. Spur dem ersten Signal voreilt oder nacheilt.
Nachteil: Werden Zählerstände nicht zu jeder Zeit gespeichert, wie es meist nach Abschalten der Anlage der Fall ist, müssen wieder neue Referenzenwerte eingegeben werden.
Richtungserkennung durch Versatz der Spuren
Impulszählung mittels diverser Schalter, Lichtschranken und Näherungsschalter, Incrementalgeber, Nachteil: es erfolgt keine Richtungserkennung. Wird der Antrieb gestoppt und läuft der Motor bis zum Einfallen der Bremsen einen kurzen Moment nach, können Impulse nicht definiert werden, ob die Last den Zug nach unten bewegt hat oder der Zug bei Leerlauffarht durch Massenträgheit weiter Aufwärtsimpulse liefert. Ein systematischer Drift ist die Folge.
Anzahl der Impulse entspricht Strecke
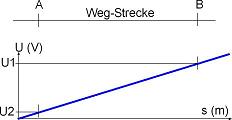
Analoge Potentiometer Auswertung, Nachteil: relative Ungenauigkeit und Verschleiß.
In Fernsehstudios werden zur Positionierung von Leuchtenhänger auch gerne Potentiometer eingesetzt. In diesem Bereich sind diese durchaus funktionell und ausreichend.
Spannung entspricht der Entfernung
Umrechnen einer Zeitspanne für einen ungefähren Fahrtweg. Es erfolgt keine Rückmeldung über den tatsächlichen zurückgelegten Wert.
Der einfachste Weggeber ist das Mitstoppen der Zeit bei einer Konstanten Geschwindigkeit. Man wird überrascht sein wie exakt ein solches System sein kann wenn die Zeit vom Steuerrechner der die Fahrt auslöst in Längenstrecken umgerechnet wird. Eine solche Lösung ist selbstverständlich nicht als "Erfassung" zu deklarieren und demnach auch nicht für sicherheitsrelevante Aufgaben einsetzbar.
Tragmittel
Hochfester zäher Federbandstahl bisher nicht bekannter Güte ist praktisch verschleißfrei. So war es naheliegend diesen Vorteil auch für die Hebezeuge der Veranstaltungstechnik zu nutzen mit der Erkenntnis, dass ein flaches Band auf einer Umlenkrolle weniger Geräusche verursacht als ein gedrilltes Stahlseil. Auch können dieses Stahlbänder aufgrund Ihrer Geometrie in mehreren Lagen übereinander aufgerollt werden. Nebenbei ist dieses glatte Band viel unauffälliger, da Lichtreflexionen die bei runden Objekten wie Stahlseil oder Kette immer auch zu jedem Betrachter reflektiert werden, hier von der glatten Flachen Seite kaum wahrgenommen werden. Auch verdreht sich eine Einzellast nicht, wie es bei Stahlseilen aufgrund der Geometrie zwangsläufig auftritt. Moderne Bandführungen erlauben sogar einen beachtlichen Schrägzug.
Für Synchronaufgaben oder gleichbleibender Geschwindigkeit muss ein Algorithmus den Frequenzumformer korrigieren, damit die unterschiedliche Antriebsgeschwindigkeit, die durch Umfangszunahme während des Aufwickeln auftritt, ausgeglichen wird.
Gewöhnlich trifft man in einem Theater auf Stahlseile. Aber als Mobile Punktzuganlage sind nur wenige Sonderkonstruktionen bekannt. Denn um die Seile normgerecht in einer Lage aufzuwickeln, werden Trommeln mit einem Mindestdurchmesser benötigt. Dies bedarf enorm Platz und macht eine Winde für den mobilen Einsatz sehr unhandlich. Unwesentlich ist dabei der Aspekt das ein laufendes Seil auch geringe Geräusche verursacht wenn die einzelnen Seelen über die Umlenkrollen geführt werden. Die Ablegerreife für das verschleißbehaftete Stahlseil wird auch in der DIN 15020 definiert.
Ältere Punktzuganlage zwar nicht mobil aber immerhin mit Stahlseilen
DIN 56950 Maschinentechnische Einrichtung
5.2.6.2
Bei Stahlketten muss sichergestellt sein, dass mindestens drei Kettenglieder formschlüssig im Eingriff des Antriebes (Kettennuss) sind.
Ist zur Aufnahme des Tragmittels nur sehr beschränkt Platz, bzw. ist die hängende Last extrem schwer, so haben sich Ketten bewährt. Diese können relativ hohe Lasten aufnehmen und sind zudem sehr kompakt in einem Sack zu verstauen. Natürlich besteht die Gefahr das die Kette verdreht vom Kettenzug eingezogen wird, aber moderne Kettenzüge weisen einen "Jam free" Ketteneinlauf auf, die wirkungsvoll ein verklemmen bzw. im ungünstigsten Fall das zerstören der Kette verhindern.
Der Verschleiß von gehärteten Ketten ist zwar wesentlich geringer als der von "normalen" Ketten, dennoch werden die "weichen" Ketten gerne im Tourneebetrieb eingesetzt, da diese wesentlich unempfindlicher gegen Einkerbungen sind. Genau genommen muss man sagen dass der Weiche Werkstoff zwar leichter Gebrauchsspuren aufweist, wenn man z.B. auf die Kette einen Kettenzug unsanft ablässt. Aber diese Spuren haben nicht die verheerende Auswirkung wie bei gehärtetem Material, bei der eine Kerbe dann das Brechen der Kette bedeuten kann. So werden harte Ketten hauptsächlich beitinstallationen eingesetzt und weiche Ketten im Tourneebetrieb. Ketten werden hauptsächlich bei langsamen Hebeaufgaben eingesetzt, auch weil der Polygoneffekt der Kette einen unruhigen Lauf und Schwingungen verursacht, damit dynamischen Faktor erhöht ist, sowie schnelle Fahrten problematisch sind.
Sicherheitsrelevante Kraftfluss.. Motor Aus | Motor EIN
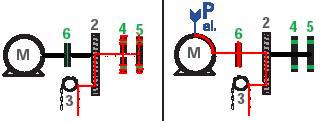
Mit einem Dynamisch selbsthemmenden Getriebe ist einer der Grundanforderungen der BGV C1 "Sicher gegen ungewollte Bewegung" schon durch die Mechanik gegeben. Hier ist auch bei Ausfall einer Phase kein unkontrolliertes Absinken der Last möglich.
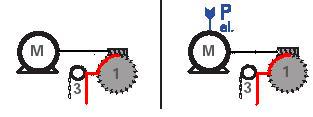
Hier befindet sich eine Rutschkupplung zwischen vor den sicheren Halt der Bremse. Wenn eine erhebliche Überlast vorliegt, wird die Rutschkupplung auslösen. Ein Einfallen der Bremsen nach Notaus z.B. bleibt dann ohne Wirkung. Deshalb wird oft bei Umbauten zu BGV C1 vom Sachverständigen das Verstiften der Kupplung gefordert. Die Überlasterkennung muss auf anderen Weg erfolgen.
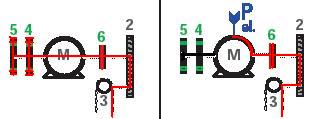
Hier ist nur im Fahrbetrieb eine Gefährdung durch die Rutschkupplung zu erkennen. Befindet sich der Zug im Stillstand, tragen beide Bremsen zuverlässig die Last.
Steuerung
DIN 56950 7.6.2.2 Befehlseinrichtung für maschinentechnische Einrichtungen
Die Bewegungsrichtung muß von einem Hubbefehlsgeber eindeutig angezeigt werden.
Ein kurzes Aufflackern einer Leuchte die aufgrund von Wegfall der Versorgungsspannung entsprechend der vorhin beschriebenen Maßnahme, nicht mehr anzeigt, erfüllt diese Funktion nicht.
Bei Gegenläufigen Bewegungen sind diese eindeutig anzuzeigen.
Die Bewegung muß zum Stillstand kommen, wenn der Hubbefehlsgeber losgelassen wird (Totmanschaltung).
Die Hubbefehlsgeber müssen gegen unbeabsichtigter und unbefugter Betätigung gesichert sein.
Bei mehreren Steuerstellen muss der Fahrtbefehl gegen die anderen steuerungen verriegelt sein.
DIN 56950 Abschnitt 7.6.3.1.1 Asynchrone Gruppenfahrt ohne Gruppenabschaltung
DIN 56950 Abschnitt 7.6.3.1.2 Asynchrone Gruppenfahrt mit Gruppenabschaltung
DIN 56950 Abschnitt 7.6.3.2 Synchrone Gruppenfahrt
DIN 56950 Abschnitt 7.7 Sicherheitsbezogene Funktionen und Steuerfunktionen im Fehlerfall
Für elektrische, elektronische und programmierbare Funktionen ist eine Gefahrenanalyse durchzuführen.
Für das System folgt eine Gesammtgefahreneinschätzung nach DIN EN 61508.
Die allgemeinen Anforderungen an Steuerfunktionen im Fehlerfall sind in der DIN EN 60204-32 (VDE 0113 Teil 32) beschrieben.
DIN 56950 Abschnitt 7.7.2 Vorsehen von Redundanz
Schütze und Relais in Schutzeinrichtungen sind grundsätzlich redundant auszuführen und zusätzlich zu überwachen. Man spricht hier auch von zwangsgeführten Relais, deren weiteres Kontaktpaar mechanisch mit dem ersten verbunden ist, um ein Aneinanderkleben der Arbeitskreise durch Schaltabbrand, signalisieren zu können. Redundant bedeutet einen zweiten unabhängigen Weg wie z.B. zeitverzögertes Abschalten der Versorgungsspannung, oder Sicherheitsschaltungen gemäß der nach dem Risiko geforderten Klasse und dementsprechender Ausführung.
DIN 56950Abschnitt 7.9.3 Programmierbare Steuerungen bei sicherheitsrelevanten Funktionen
Einkanalige programmierbare Steuerungen dürfen nicht für sicherheitsrelevante Funktionen verwendet werden.
Zweikanalige programmierbare Steuerungen können für sicherheitsrelevante Funktionen verwendet werden und müssen mindesten SIL 3 Aufweisen.
DIN 56950Abschnitt 7.10 Programmierbare Steuerungen ohne sicherheitsrelevanten Funktionen
Keine Besonderen Anforderungen um z.B. Gruppen zu bilden. Keinen Einfluss auf sicherheitsrelevante Funktionen. Die Anwahlrückmeldung muss rechnerunabhängig angezeigt werden.
Geschwindigkeits und Positionswerte dürfen vom Rechner weiterverarbeitet werden, wenn Sie nicht für das sicherheitsrelevante Erreichen von Zielpunkten genutzt werden.
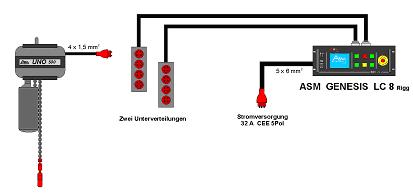
Schützsteuerung
Schütze im Steuerrack
Dieses System das nur die Pasengewendete Stromversorgung dem Kettenzug zuliefert, erlaubt nur eine Gruppenbildung ohne Gruppenabschaltung, da eine Rückmeldung der Signale zur Steuerung fehlt und damit keine gesamte Gruppe beim Auftritt eines Fehlers angehalten werden kann.
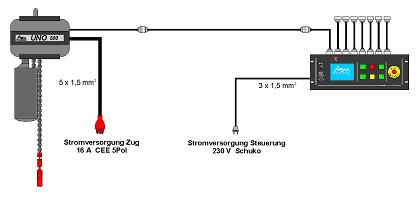
Schütze im Kettenzug
Sehr deutlich sind zwei Wendeschütze die verriegelt die Antriebsrichtung schalten, sowie ein in reihe geschaltetes Hauptschütz als redundantes Schaltelement zur Not-Abschaltung zu erkennen. Tritt hier ein Kontaktkleben an einem Schütz auf, so muß der Service am Kettenzug erfolgen der dann oft schwer erreichbar in der Decke hängt, im Gegensatz zu dem vorher beschriebenen System. Vorteil bei einer Verkabelung wie nebenstehend gezeigt ist bei diesem System das Fehlermeldungen an die Steuerung gesendet werden können. Eine Gruppenabschaltung wird hierbei möglich.
Fehler in der elektronischen Steuerung dürfen ein Stillsetzen nicht verhindern. Wird ein Fahrtsignal allein durch ein Halbleiter geschaltet, so kann ein Schluß des Halbleiters erfolgen. Diese Steuerung beinhaltet Gefahrenpotential.



Steuerungssystem über bidirektionale Digitale Bus Steuerung.
DMX ist Unidirektional und damit für eine Ansteuerung nicht geeignet, da eine Fehlermeldung zur Steuerung nicht erfolgt. Weiterhin ist ein DMX Signal bei Störungen ohne Fehlererkennung und erfüllt somit keine Anforderungsklasse. Ethernetsignale weisen den Nachteil auf das je mehr Teilnehmer sich das Netz teilen die Datenkollision das Netz immer stärker ausbremst. Ein Echtzeitverhalten ist damit nicht mehr zu gewährleisten. Folglich ist eine Störfalltolleranz nicht vorhersehbar und damit scheidet das Ethernetsystem für Sybchronfahrten aus. Bleiben die bewährten Industriebussysteme wie CAN-Bus, Interbus ... die der Anforderung gerecht werden.
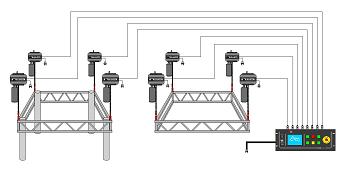
Sternförmige Vernetzung
Nachteil: höherer Verkabelungsaufwand
Vorteil: Der Ausfall eines Motors beeinträchtigt die Funktionsweise der anderen Motoren nicht.
Sind die Treiber galvanisch getrennt, so kann selbst ein Schlußauf der Leitung die Funktionsweise der anderen Züge nicht beeinträchtigen.
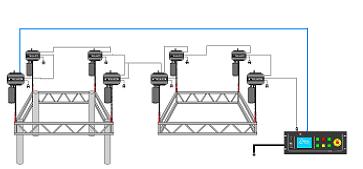
Ring Vernetzung
Vorteil:einfacher Verkabelungsaufwand
Nachteil: Der Ausfall eines Motors beeinträchtigt die Funktionsweise der folgenden Motoren.
Ein Havariertes Prerig, bei dem nur ein Motor ausgefallen ist, lässt sich leichter handhaben als wenn eine gesamte Motorengruppe ausgefallen ist.
Dieses Beispiel ist als Ring aufgebeut, so das ein zweiter Fehler erst ein Kreissegment lahm legt.
Vergleichsliste der Bussysteme
Profibus
Interbus
CAN
LON
ASI
Ethernet 100Base
Linie
Ring
Linie,Stern
Beliebig
Linie,Stern, Baum
Sternförmig ab Multiport-Repeater
Cu: 100m bei 12Mbit/s 200m bei 1.5Mbit/s
400m bei 500kbit/s 1000m bei 187.5kbit/s 1200 bei < 93.5kbit/s LWL: mehrere km
400m max. 13km auf Cu Basis
40m bei 1Mbit/s 620m bei 100kbit/s 10km bei 5kbit/s
1200m bei 39kbit/s
130m bei 1.25Mbit/s Powerline:
50m-5km bei 5kbit/s Cenelec Band A 9-95kHz
100m Erweiterbar mit Repeater bis max. 300m
Minimal: 2.5m Cu: 100m bei 100BaseTX LWL: 412m bei 100BaseFX
9.6kbit/s
19.2kbit/s
93.75kbit/s
187.5kbit/s
500kbit/s (FMS)
1.5Mbit/s (DP)
12Mbit/s (DP)
500kbit/s konstant
5kbit/s
100kbit/s
10kbit/s
9.8kbit/s
19.5kbit/s
39.1kbit/s
78.1kbit/s
156.3kbit/s
312.5kbit/s
625kbit/s
1.25Mbit/s
167kbit/s
100Mbit/s
Je nach Übertragungs-rate und Datenmenge
1ms 1E/A bis 7.8 ms bei 1096 E/A
Je nach Übertragungs-rate und Datenmenge
Je nach Übertragungs-rate und Datenmenge
Minimal 500µs 5ms bei 31Slaves 10ms bei 62 Slaves
Undefiniert
Zweileiter Cu RS 485 Zweileiter CU mit Hilfsenergie (IEC1158-2) Lichtwellen-leiter
Twisted Pair Glasfaser Funk Infrarot
Zweileiter Cu Optisch
Verdrillte 2-Drahtleitung (Powerline 230VAC oder DC) LWL Funk Infrarot Koax. Tf. Leitung
Spez. Zweileiter CU (Daten und Hilfsenergie)
Twisted Pair LWL
32 pro Segment 126 maximal (mit Repeater)
256 Stationen maximal 4096 E/A
Theoretisch unbegrenzt Abhängig vom Pysical Layer
Je nach Übertragungs-typ bis 128 pro Segment
31(je 4E, 4A: Total 124E, 124A) 62 (je 4E, 3A: Total 248E, 186A)
100 Stationen pro Segment 1024 Stationen pro Netzwerk
256 Worte
Typische Grösse 128 Byte
Minimal 72 Byte
244 Byte
8 Byte
1-228 Byte
1 Byte
1 . . . 1500 Byte
Steuerungsfunktionen
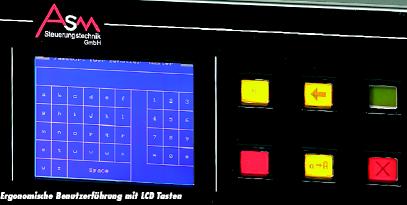
Grafische User Interface (GUI)
ist die Schnittstelle Mensch Maschine.
Hier ein gelungenes Design: LCD-Tasten wechseln die Farbe und Information nach den aktuellen Erfordernissen. Die Bedienung erfolgt im wechselseitigen Kontex zum Touch. So hat der Bediener für die Aktivierung eine z.B. Fahrbefehl das Druckgefühl eines echten Taster und im Display werden nur die Informationen angezeigt die für die momentane Tätigkeit auch benötigt werden.
Es sollte auch ein Augenmerk auf den Funktionsumfang der Steuerungssoftware und deren Ergonomie gerichtet werden. Hier einige Beispiele:
- Hand Einrichtfahrt, jederzeit ob im Programmier oder im Showmodus sollte ein Zug (Gruppe) anwählbar und verfahrbar sein.
- Zielfahrt über Zeit, insbesondere bei Ausfall von Weggeber kann man eine Show unter besonderer Beobachtung durchführen.
- Zielfahrt über Geber
- Que Speicherung, die Positionen und Beschleunigungsrampen einer Verwandlung
- Sequenzenspeicherung, Das Sequentielle aneinanderreihen verschiedener Verwandlungen
- Sequenzablauf - Go, das Abfahren einer Verwandlung über ein Go Befehl
- Sequenzablauf - Timer, das Abfahren einer Verwandlung zu einem bestimmten Zeitpunkt (Totmannschaltung muß aktiv sein)Sequenzablauf - Ereignis, das Abfahren einer Verwandlung zu Ereignisse wie erreichen einer bestimmten Position von Zug x. (Totmannschaltung muß aktiv sein)
- Delay, Wait, Loop, link, damit erhält man die Möglichkeit verschiedene ständig wiederholende Bewegungen oder Bewegungsabschnitte automatisch ausführen zu lassen.
- Gruppe lose (Gruppe Asyncron, ohne Gruppenabschaltung), entsprechend einer Anwahlhilfe. Züge aus der Gruppe können jederzeit herausgenommen werden. Ein Auftreten eines Fehlers an einem Zug hat keine Auswirkung auf die Fahrt der anderen Gruppenzüge.
- Gruppe Asyncron, mit Gruppenabschaltung, entsprechend einer Anwahlhilfe. Züge aus der Gruppe können jederzeit herausgenommen werden. Ein Auftreten eines Fehlers an einem Zug stoppt alle Züge innerhalb der Gruppe.
- Gruppe Synchron (Synchronfahrt), Züge aus der Gruppe fahren synchron oder alle Züge innerhalb der Gruppe werden gestoppt. Bei der nächsten Verwandlung können Züge aus der Synchronen Gruppe bei anderen Gruppenkonstellationen mitarbeiten. (Senken und kippen von Leinwänden)
- Verbundgruppe (Verriegelung der Gruppentypen), dabei werden über eignen Geschützen Userbreich Gruppen angelegt, bei denen es nicht möglich ist einen Zug aus dieser Gruppe heraus alleine zu verfahren (Plateau verfahren)
- Strahlenfahrt (kippen einer Leinwand mit mehr als zwei Zügen pro Achse)
- User Verwaltung in verschiedenen Herachieebenen, Zugangsbeschränkung, Passwortfunktion
- Help Funktion
- Logfile Fehler / Bedienereingaben
- Externer Trigger, Midi, DMX, SMPTE, An
- Preview Funktion
- Negative Höhen einstellbar
- Importieren und exportieren der Show und Anlagedaten
- wünschenswerte Funktion: Presets
- wünschenswerte Funktion: Patch
- wünschenswerte Funktion: beliebig viele Shows/Gruppen/Cues
- wünschenswerte Funktion: Record - Momentaufnahme
- wünschenswerte Funktion: offline Simulationsmodus
- Es sollte zu jeder Zeit die Möglichkeit gegeben sein direkt auf die Antriebe zuzugreifen sowie während einem Showablauf die nächste Verwandlung im Previewmodus zu betrachten und zu editieren.
Das Betriebssystem ist für die Betrachtung der Benutzerschnittstelle Mensch Maschine zweitrangig.
Dagegen soll im Hinblick auf sicherheitsrelewante Funktionen das Betriebsystem echtzeitfähig,- und sein Verhalten vorhersehbar, sein. Z.B. bei Windows sind die Ereignisse nicht vorhersehbar darüber hinaus ist kein Quellencode bekannt, um diese Ereignisse zu verstehen. So ist z.B. Windows als Betriebssystem für sicherheitsrelevante Funktionen absolut ungeeignet.
Eine unabhängige Überprüfung der Software ist auch über die CE TE COM möglich.
Nach VBG C1 ist es erheblich, welche Lastart gefahren wird. Demnach sind verschiedene Zusatzausstattungen nötig, wie z. B. Gruppenabschaltung, Unterlastabschaltung oder Synchrone Gruppenfahrt, die hauptsächlich über frequenzgeregelte Antriebe realisiert wird. Je nach Ausstattung dieser geforderten Zusatzausrüstung variiert der Preis eines Kettenzuges um ein Vielfaches. Aber auch die Funktionen wie Positions- und Zielfahrten bis hin zu den für komplexe Bewegungsabläufe benötigen Komponenten verursachen einen erheblichen Preisunterschied.
Weiter muss man die Bewegungsdynamik betrachten. Antriebe mit Frequenzumrichter (FU) können in einem weiten Stellbereich die Geschwindigkeit variieren. Die wird einmal szenisch genutzt oder ist notwendig, um eine Last, die auf mehr als drei Züge verteilt ist, gleichmäßig (synchron) zu verfahren. Der FU regelt die Differenzen aus.
Kettenzüge mit zwei Festgeschwindigkeiten sind ideal, um Lasten mit kleiner Geschwindigkeit sanft anzuheben oder beim Ablassen exakt in die Position zu manövrieren. Mit der zweiten schnellen Geschwindigkeit kann dann das Objekt rasch im Schürboden verschwinden. Für Personenbeförderung muss der Kettenzug über ein Notablass bei Stromausfall verfügen und als Leuchtenhänger muss nach DIN 15560-46 das Tragmittel mindestens zweifach vorhanden sein.
Prinzipieller Aufbau eines BGV D8 Kettenzug, bestehend aus Motor, Getriebe, Bremse, Kettenantrieb, Rutschkupplung, und hier mit Endschalter:
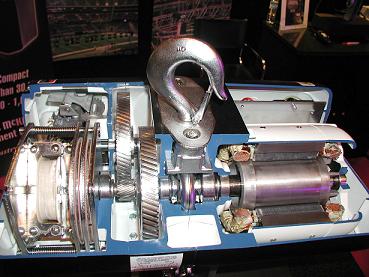
DIN 56950 Maschinentechnische Einrichtung ersetzte DIN 56925 (Punktzüge)
5.2.7 Dynamisch selbsthemmendes Getriebe oder zwei unabhängige wirkende Sicherungseinrichtung (Bremsen)
Eine heftige dynamische Belastung, verursacht durch das Einfallen von Bremsen, kann z. B. mit bremsfreien Systemen, die ein dynamisch selbsthemmendes Getriebe aufweisen, vermieden werden. Außerdem sichert ein dynamisch selbsthemmendes Getriebe das Halten der Last, selbst bei nachträglich eingebrachter Überlast, zu jedem Zeitpunkt. Ein Durchrutschen wird durch das stärkere Versperren des Getriebes wirkungsvoll verhindert. Bei einem Notaus fallen auch keine Bremsen ein und verursachen damit auch keine extreme dynamischen Spitzenbelastungen. Das dynamisch selbsthemmende Getriebe läuft immer sanft aus. Aber auch der Betriebskomfort in Bezug der Geräuschentwicklung ist hier ideal. Wird der Zug während einer Show verfahren ist das berüchtigte Bremsklakken konventioneller Lösungen nicht zu hören.
TÜV geprüfte Getriebebruchsicherung
Das von ASM verwendete Schneckengetriebe weist neben dem
Schneckenrad noch ein Pilotrad auf. Das Pilotrad wird mit dem
Schneckenrad von der Spindel angetrieben. Sollte aus irgendeinem
Grund ein Bruch auftreten, so verdreht sich das Pilotrad zwangsläufig
und Haltebolzen werden in Stoppkammern getrieben. Das Getriebe
versperrt. Somit ist selbst bei Getriebebruch ein sicheres Halten.
gewährleistet.


Topologie
Bus-leitungs-länge
Über-tragungs-rate
Zyklus-zeit
Über-tragungs - medium
Anzahl Teilnehmer
Telegramm-Länge
Nutzdaten-Länge




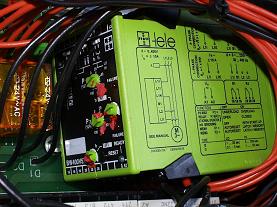
vielmehr keine Lastangabe geben kann. Weiterhin ist das Modul wie hier von TELES mit einer Genauigkeit von +- 5% angegeben. Bei einer Tonne sind dies immerhin 100 kg Abweichung und dabei sind mechanische Faktoren wie warmes Getriebeöl nach Langzeitbetrieb noch nicht berücksichtigt. Außerdem muss vor dem Auslösen bei Überlast noch eine Totzeit abgewartet werden, da bei bremsenbehafteten Motoren der dynamische Faktor von ca. 1,4 beim anfahren und abbremsen abgewartet werden muss, danach sind noch die dynamischen Schwankungen zu mitteln um auf die statische Last zu schließen.





Schrägzug in x und y Richtung durch schwenkenden Tragmittelkopf ähnlich einem Movinglight




| Regelwerk |
| Übersicht |
| Aufbau |
| D8 Plus |
| Physik |
| Anwendung |
| Leuchtmittel |
| Scheinwerfer |
| Energie |
| Dimmen |
| Signale |
| Pulte |
| Formeln |
| Messtechnik |
| Wirkungsgrad |
| Farbaddition |
| Farbsubtraktion |
| Farbtemperatur |
| Farbdreieck |
| Farbempfinden |
| CAD |
| Pläne |
| Einleuchten |
| Symbole |
| Festkörper |
| Entladungsl. |
| Mischlicht |
| Farbwieder. |
| UV-Strahlung |
| Lif.-Ansi-Code |
| Abk. |
| Kohlefaden |
| Wolframfaden |
| Halogen |
| LED |
| LED-Allgebr. |
| O-LED |
| Luminizenz |
| Physik |
| Typen |
| Binning |
| Temperatur |
| Optik |
| Buntweiss |
| Weisslicht |
| Farbwiedergabe |
| Ansteuerung |
| Treiber |
| K-Strom |
| Plasma |
| Metalhalo |
| Na Hochdr. |
| Na Niederdr. |
| Leuchtstoff |
| Neon |
| Xenon |
| Zündgeräte |
| Konventionel |
| Movinglights |
| Zubehör |
| Spiegel |
| Nachbauten |
| Fluter |
| Niedervolt |
| PAR |
| Blinder |
| Linsen |
| Profiler |
| Verfolger |
| Fokus |
| Linsentyp |
| Theater |
| Studio |
| Ellipsen... |
| Kondensor |
| Linsentubus |
| Schieber |
| Motore |
| ML-Farben |
| V*L-Farben |
| Dimmer |
| Spot/Wash |
| ML-Gobo |
| Beam |
| Ausstattung |
| ShootOut |
| Farbfolien |
| Dichro-Filter |
| Goboprojektion |
| Gobotypen |
| Sicherungsseil |
| Saveking |
| Aufhängung |
| Lightlock |
| IEC-Stecker |
| Steckerbez. |
| RCD |
| Ele. Dimmarten |
| Summen |
| R-L Last |
| Sinusdimmer |
| Ph. Anschnitt |
| Halbleiter |
| Ausstattung |
| Grundlagen |
| DMX |
| RDM |
| ACN |
| Ethernet |
| Architektur |
| Dublex |
| Kabel |
| Analog |
| Multiplex |
| Digital |
| Merge/ Splitter |
| Messen |
| DMX512-A |
| History |
| Fehlersuche |
| Topologie |
| OSI Schichten |
| V-LAN |
| Spanning Tree |
| 5-4-3-Regel |
| TCP/UDP |
| Hardeware |
| Adressierung |
| DSI |
| DALI |
| EIB |
| LON |
| LCN |
| Preset-Pult |
| Speicherpult |
| Tracking |
| Paletten |
| HTP-LTP |
| Setup |
| Einrichten |
| Rec. - Play |
| Funktionen |
| Havarie |
| Netzwerke |
| Medienserver |
| Punktzüge |
| Drahtseilhalter |
| Regelwerk |
| Übersicht |
| Aufbau |
| D8 Plus |
| Dokumentation |
| Zeichen |
| Leuchtennorm |
| Typenschild |
| Anleitung |
| CE-Zeichen |
| IP-Klasse |
| Schutzklasse |
| Funkentsörung |
| Prüfzeichen |
| Zahlen |
| Dateiendung |
| Sonderzeichen |
| A |
| B |
| C |
| D |
| E |
| F |
| G |
| H |
| I |
| J |
| K |
| L |
| M |
| N |
| O |
| P |
| Q |
| R |
| S |
| T |
| U |
| V |
| W |
| X |
| Y |
| Z |
| Kontakt |
| Hall of Fame |
| A-News |
| Links |
| Cats Corner |
| LED-Line-Scan |
| Green OPV |